
隨著科技的進步和人們對于生活便利度的追求,導航系統已經成為了日常生活中不可或缺的一部分。而室內地圖導航系統,作為導航系統的重要組成部分,也日益受到人們的關注。本文將深入剖析室內地圖導航系統的相關技術,包括室內定位技術、室內地圖構建技術、室內導航路徑規劃技術等,并探討這些技術在現實中的應用情況。

一、室內定位技術
定位技術是室內地圖導航系統的核心,它決定了導航系統的精度和實用性。目前,常見的室內定位技術主要包括藍牙、WiFi、RFID等。
藍牙定位:藍牙定位主要通過測量信號強度來定位。藍牙設備發射信號,多個接收設備接收信號并比較信號強度,通過三角定位或者指紋地圖技術確定設備位置。這種方法的優點是成本低、設備體積小,但定位精度能滿足導航需求,更精準的人員物品需搭配其他定位技術實現。
WiFi定位:WiFi定位通過測量信號傳播時間來確定位置。WiFi設備發送信號,接收設備通過測量信號傳播時間計算出距離,再結合多個設備的距離信息即可確定位置。這種方法的優點是精度高、成本低,但受環境影響較大。
RFID定位:RFID定位通過讀取標簽信息來確定位置。RFID標簽部署在目標區域,當標簽被閱讀器掃描時,通過標簽的信息確定位置。這種方法的優點是成本低、定位精度高,但需要預先部署標簽。

二、室內地圖構建技術
地圖構建是室內地圖導航系統的另一個重要環節,它需要將現實世界的空間信息轉化為計算機可識別的地圖數據。常見的地圖構建方法包括實地測量和圖像識別。
實地測量:實地測量需要人工測量空間信息,然后將這些信息轉化為地圖數據。這種方法精度高,但工作量大、成本高。
圖像識別:圖像識別通過計算機視覺技術自動從圖像中提取空間信息,然后轉化為地圖數據。這種方法效率高、成本低,但容易受到光照、視角等因素的影響。
圖紙自動轉化:這是一種新型技術,目前已知維小幫導航系統的后臺編輯器可以滿足,實現上傳CAD圖紙自動識別生成電子地圖,這種方法可以解決光照等現實因素影響,但對于圖紙有一定要求。

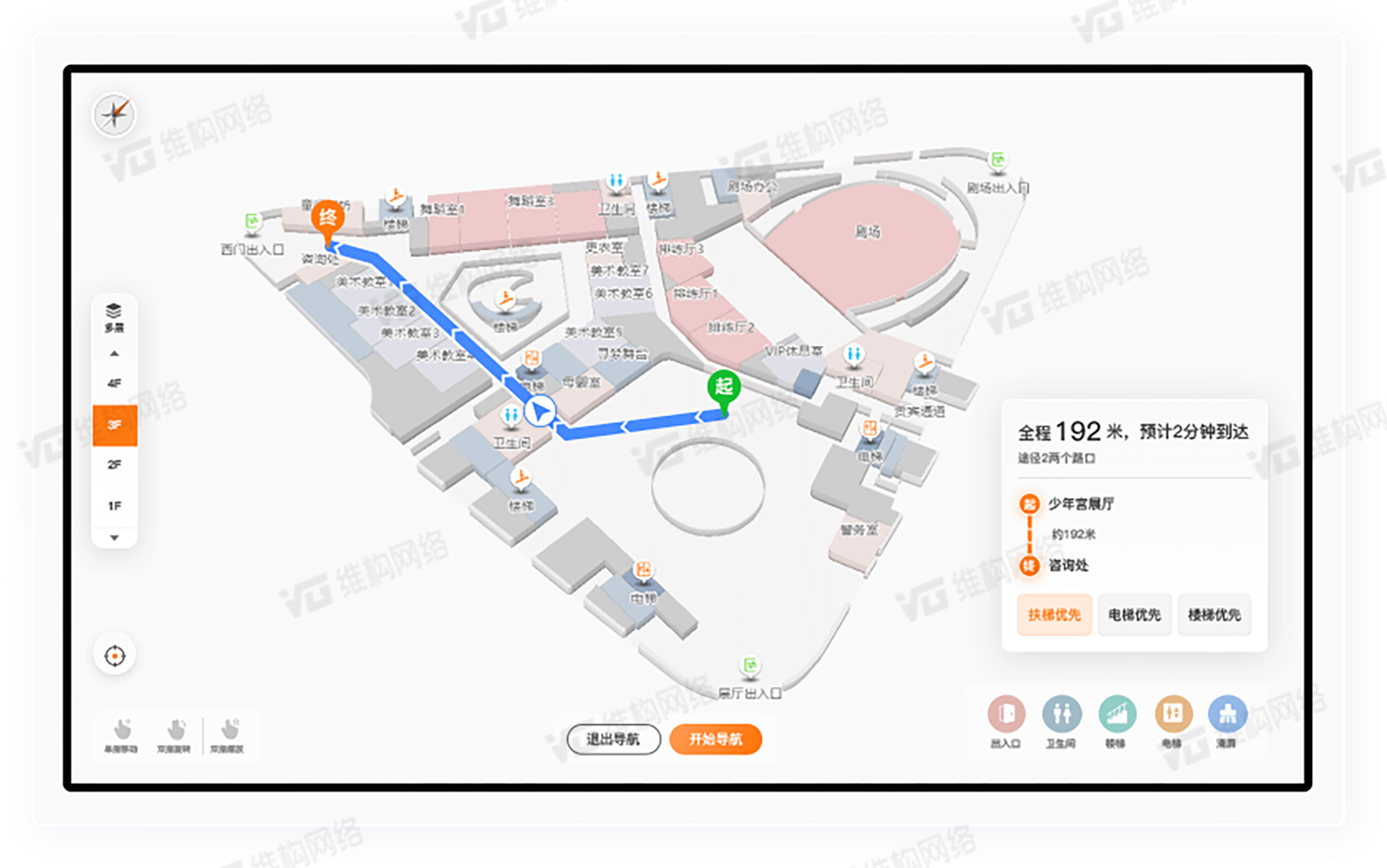
三、室內導航路徑規劃技術
路徑規劃是室內地圖導航系統的另一個關鍵功能,它需要根據用戶的位置和目標位置,自動規劃一條最優路徑。常見的路徑規劃算法包括Dijkstra算法、A*算法等。
Dijkstra算法:Dijkstra算法是一種基于權重的最短路徑算法,適用于權值非負的圖。它的優點是簡單、易于實現,但計算量大,不適用于大規模的圖。
A算法:A算法是一種啟發式搜索算法,它在Dijkstra算法的基礎上引入了啟發函數來減少搜索范圍。A*算法的優點是搜索效率高、適用范圍廣,但需要預先知道地圖信息。
下一篇:淺析室內外導航一體化技術如何實現


